Zum Seiteninhalt
Barrierefreiheit-Einstellungen öffnen
Dein Browser unterstützt die Seite nicht. Bitte aktualisiere deinen Browser oder lade einen anderen herunter
Wähle die Sprache
Deutsch
EUR
Hilfe & Kontakt
Lieferung
Rückerstattung & Garantie
Katalog
Top-Suchanfragen auf Ayzeze
Suchen
Melde dich an
Meine Bestellungen
Warenkorb
Sport & Freizeit
Elektronik & Technik
Haushaltsgeräte
Handyhüllen
Damenmode
Schuhe
Herrenmode
Beauty & Pflege
Gesundheit
Haushalt & Wohnen
Auto & Motorrad
Baby & Kind
Hobbys & Kreativität
Heimwerken
Garten
Uhren
Taschen & Koffer
Schmuck & Accessoires
Spielzeug & Spiele
Tierbedarf
Events & Partys
Schul- & Bürobedarf
Ausgewählte Smartphones
Bücher
K-Pop
Xiaomi
Suchen
Artikel ausverkauft
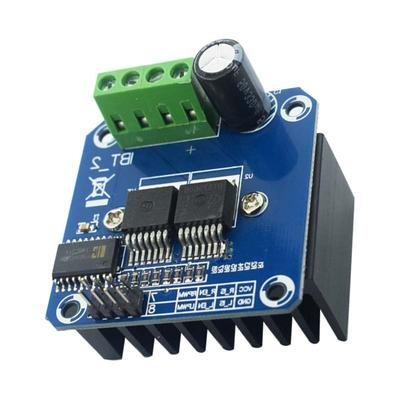
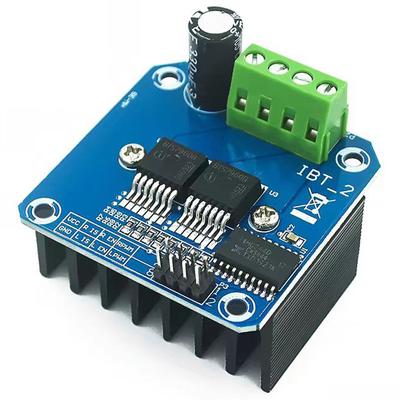
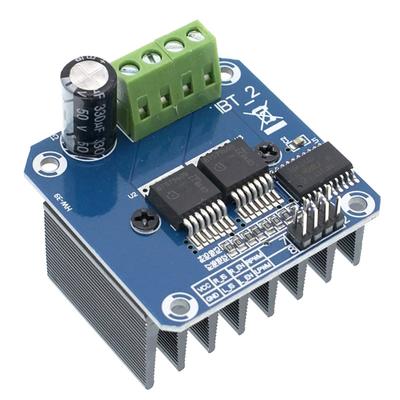
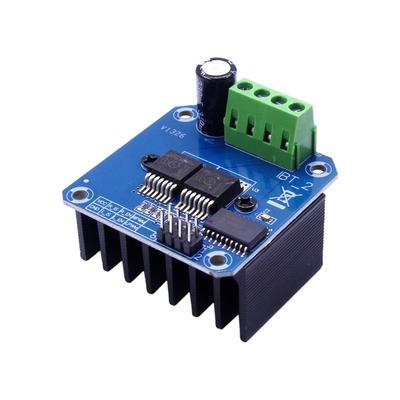
5,5 V bis 27 V Hochleistungs-Motorantriebsmodul BTS7960 Motortreiber Motorantriebsmodul DIY-Elektronik
Ähnliche Artikel
Preis
25,71 €
Intelligentes Auto-Motorantriebsmodul Hohe Leistung BTS7960 43A Strombegrenzung Steuerung Halbleiter-Kühlantrieb
Preis
24,64 €
Leistungsstarkes intelligentes Auto-Motor-Treiber-Modul BTS7960 43A stromlimitierte Steuerung Halbleiter-Kühltreiber
Preis
24,73 €
Doppel BTS7960 43A H-Brücke Hochleistungs-MotorTreiber Modul / DIY Smart Car Stromdiagnose
Preis
16,59 €
Bts7960 43A Doppel-H-Brücke Hochleistungs-Treibermodul Diy Smart Car Stromdiagnose für Arduino
Preis
33,78 €
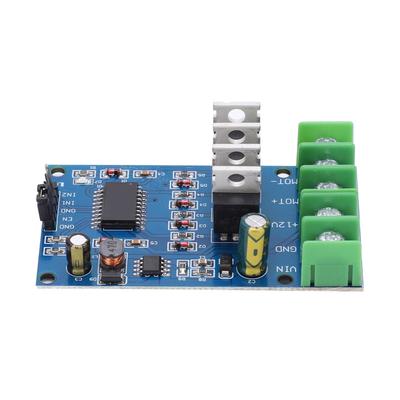
9V-30V 60A DC-Motortreibermodul Doppelkanal PWM Hochleistungs-H-Brücken-DC-Motortreibermodul für
Preis
29,43 €
Motortreibermodul 0-30A Zweikanal-H-Brücke Reversible PWM-Geschwindigkeitsregelung DC-Motorantriebsplatine
Preis
14,66 €
Preis
16,71 €
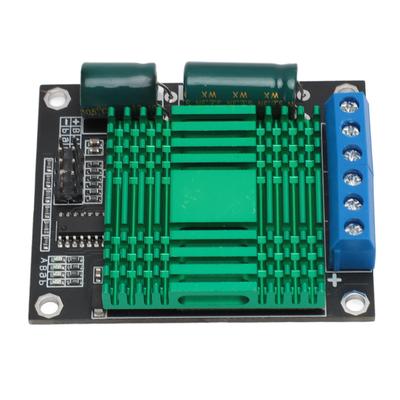
Motortreiber-Modul H-Brücke Hohe Leistung mit 4 externen NMOS-Röhren Bremse Vorwärts und Rückwärts DC
Preis
24,84 €
Industrielles 15A Zweikanal-DC-Motorantriebsmodul mit Bremsfunktion Elektronisches Bauelement
Preis
24,24 €
TB6560 3,5A Schrittmotor-Treiber-Controller-Platine 10V-35V CNC-Fräsersteuerung Niederspannungs-Überhitzungs-Stromschutz
Preis
24,87 €
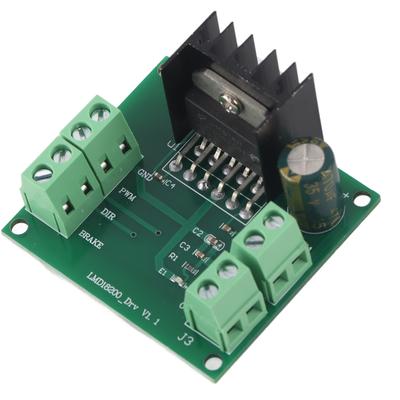
DC-Motorantriebsmodul PWM-Geschwindigkeitsregelung Motortreiber-Controllerplatine LMD18200T 4.5?5,5 V
Preis
27,92 €
TB6560 3A Schrittmotortreiber CNC-Schrittmotorplatine Einachs-Controller 10 Stufen Motorcontroller-Platine
Mehr anzeigen